
《Hierarchically Depicting Vehicle Trajectory with Stability in Complex Environments》于2025年6月19日刊登在机器人领域权威期刊《科学·机器人》(Science Robotics)。这项工作第一作者为微分智飞算法实习生韩志超,通讯作者为公司创始人&CEO高飞。该工作提出了融合具身理解与时空优化的分层规划系统,突破了复杂环境中非完整运动机器人路径规划与执行的时间和数值稳定性难题。系统通过设计图域表征下的深度网络结构,赋予机器人具身大脑,让其像人一样获得对环境的全尺度理解。之后结合微分平坦性与伪弧映射,构建无奇异点的时空轨迹优化器,将初值路径转化为可被机器人精确执行的最优运动指令。该方法最终实现了稠密动态场景下高效、平滑且可靠的自主导航,为机器人具备媲美人类的稳定智能导航能力,开辟了新的发展方向。(论文链接为:https://www.science.org/doi/10.1126/scirobotics.ads4551)
01#
三大科研成果
实现从 "机械搜索" 到 "类人直觉" 的跨越
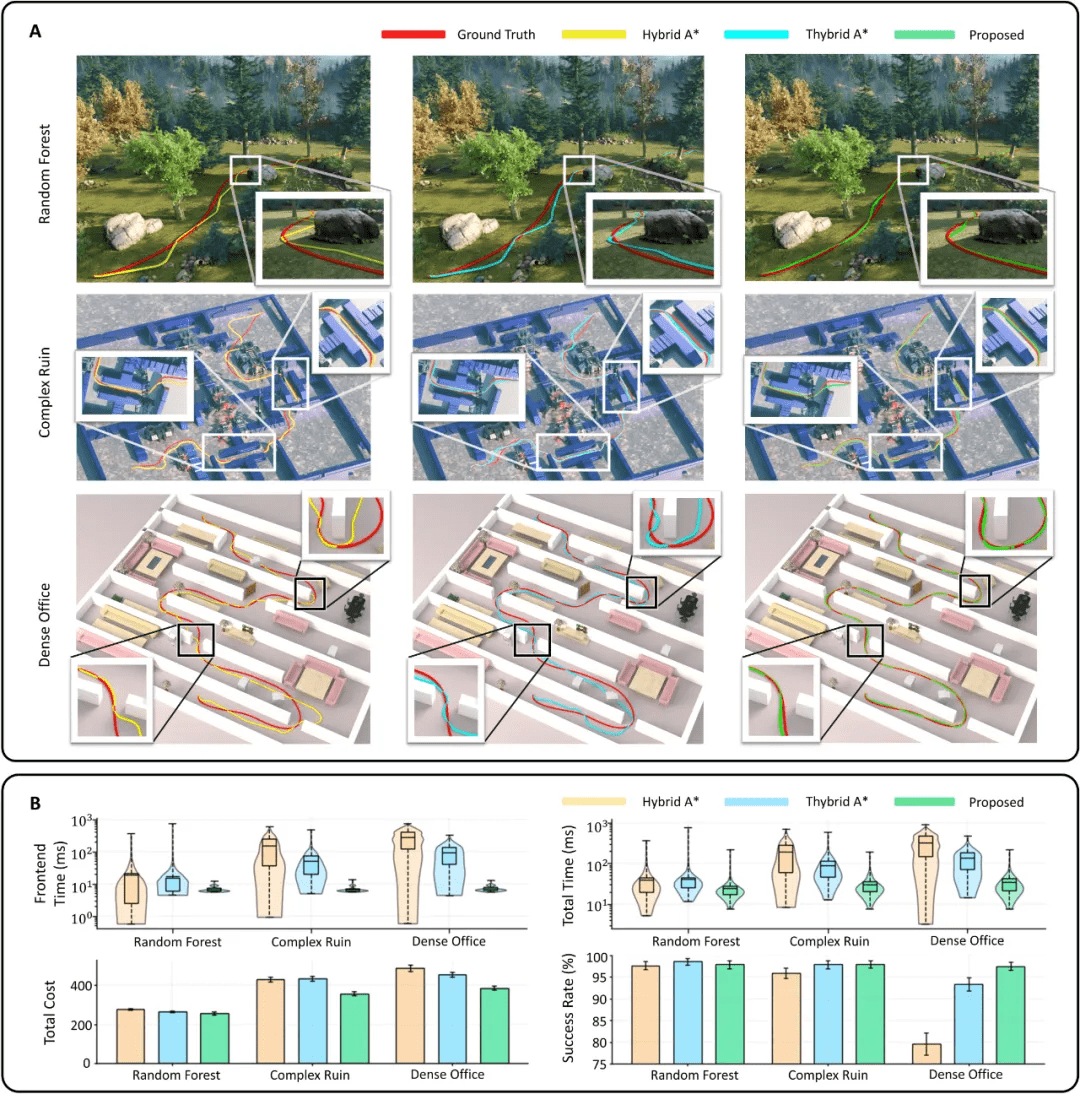
任意复杂环境下展现出的时间稳定性
我们在各种场景下进行了数千次实验,并与传统方法展开定量对比。随着环境复杂性的提升,传统算法规划时间迅速攀升,而我们的前端规划无论在何种场景中都能快速、稳定输出可行路径。除了效率以外,我们最终获得的轨迹也更平滑,质量更高。这种跨环境的稳定计算可以为极限场景应用提供关键保障:无论环境如何复杂多变,机器人均可在预期时间内完成路径规划,始终保持敏捷的反应能力。
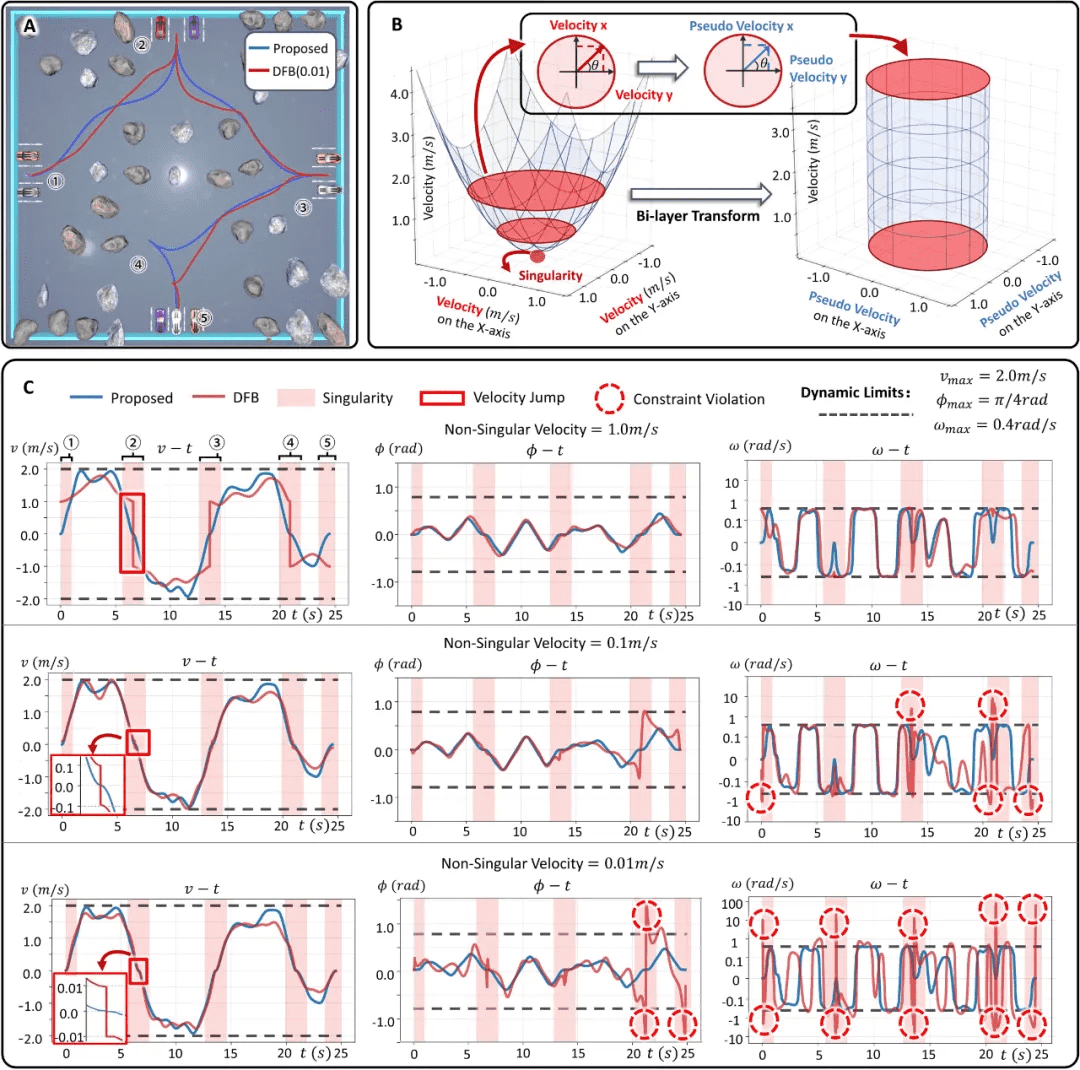
复杂机动场景下轨迹的稳定数值收敛性
传统微分平坦技术虽能简化计算,却难以避免奇异点带来的数值不稳定性——当车辆停止或转向时,速度接近零容易导致计算崩溃,使机器人剧烈抖动甚至无法完成任务。所以,我们通过引入中间变量平滑重映射平坦模型并设计专用轨迹,从根本上解决了这一问题,确保在复杂环境中稳定生成满足动力学约束的最优轨迹。结果显示,与带有奇异点的基准方法相比,我们的系统减少了38.2%的最大位置跟踪误差和57.7%的最大角度跟踪误差,大幅提升了导航系统可靠性。
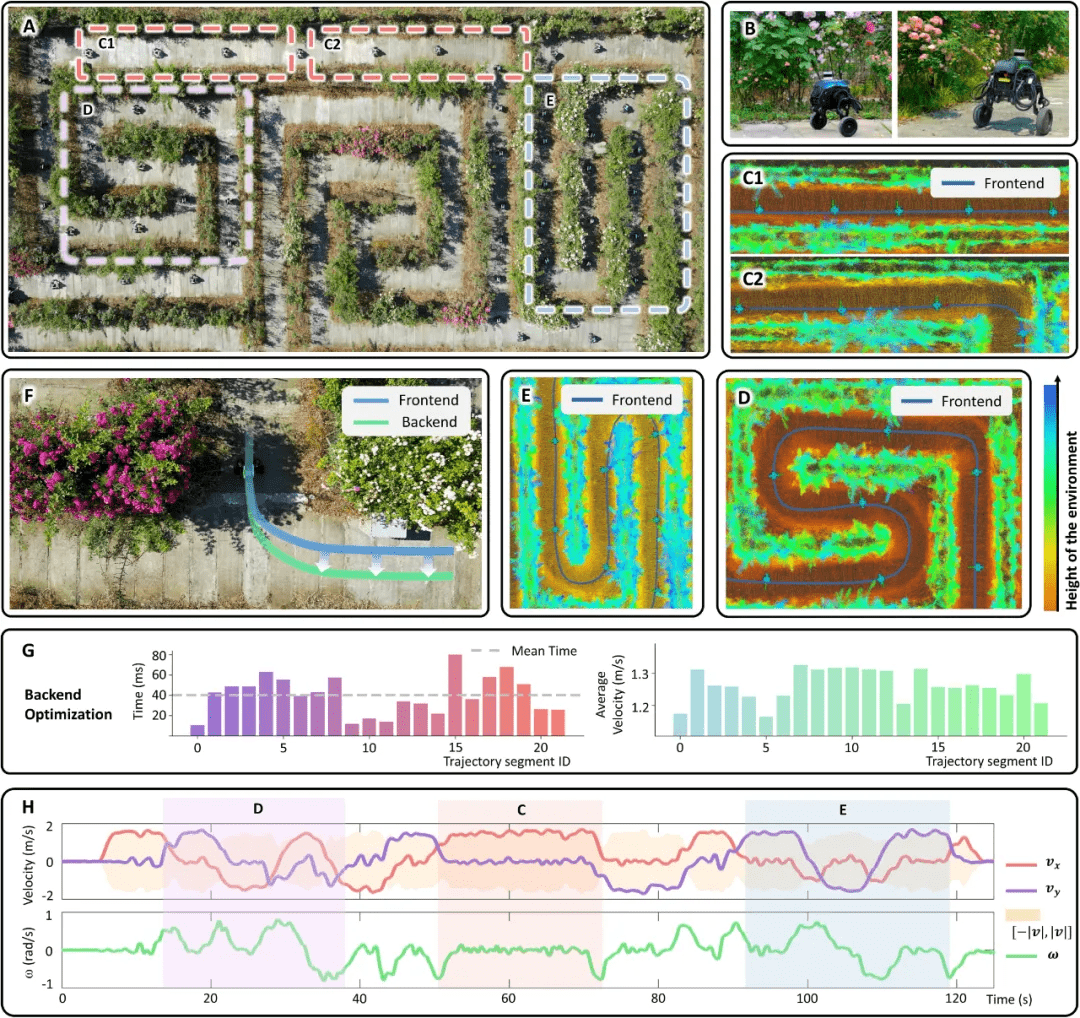
大尺度迷宫环境下的全局导航验证
我们在大尺度复杂迷宫中进行了实物测试,让轮腿机器人在仅依靠机载芯片和激光雷达的情况下,成功完成了数百米的全自主导航。机器人从起点出发,轻松穿越横向弯道、长直道和纵向弯道,全程表现稳定流畅。系统前端基于离线数据进行训练,之后无缝迁移至实物环境。不仅如此,得益于算法的高效性,面对地图偏差或突发障碍时,系统依然能在运动状态下实时紧急规避,展现出强大的环境适应能力。
02#
基于分层规划框架的高灵活性
延伸至多场景应用
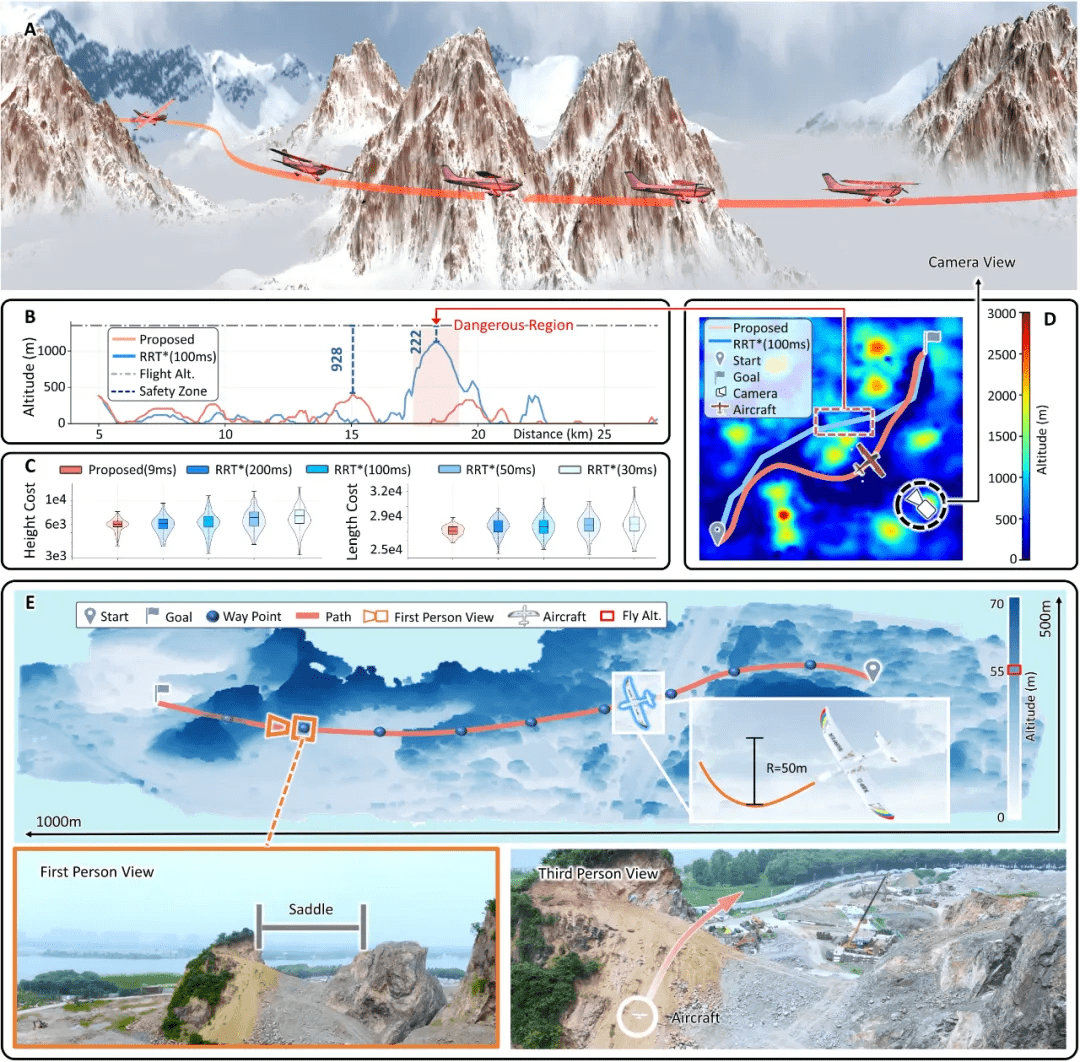
固定翼导航扩展
我们把这套规划系统成功应用到了固定翼无人机导航上,直接用地形高度地图来规划飞行路线。在山地丘陵地区导航时,算法不到 0.01 秒就能算出几乎最优的飞行路径。通过实际飞行测试我们发现,系统能引导固定翼无人机从山峰之间的低洼处穿过,既缩短了飞行距离,又保证了足够的地形安全空间。并且,所有实际飞行训练仅基于仿真数据,这充分证明了我们算法的适应性和在固定翼等平台上的应用潜力。
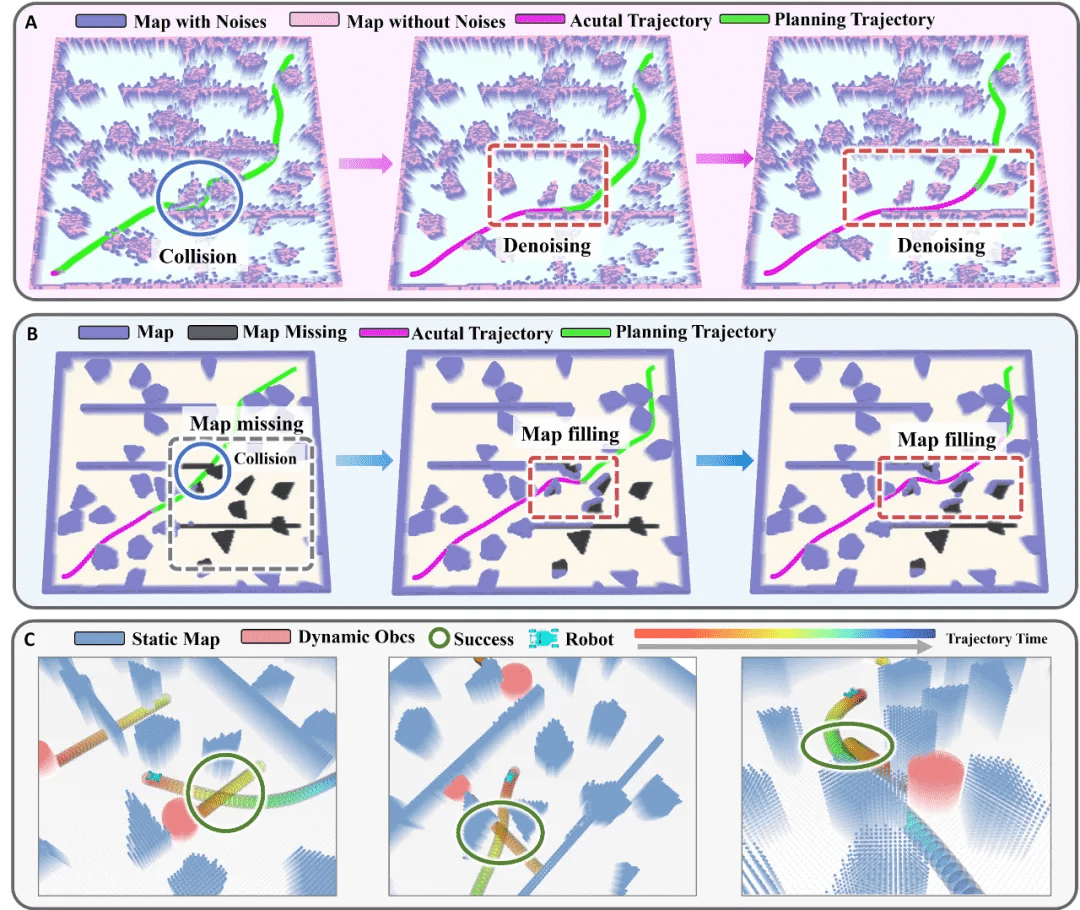
不确定性场景下的鲁棒适应性
为全面评估系统在不确定环境下的表现,我们设计了包含高密度障碍物和复杂墙体的严苛测试场景。测试覆盖了实际应用中最具挑战性的三种不确定情况:噪声地图、不完整地图和动态障碍物环境。面对噪声地图,系统依靠泛化能力识别正确的导航拓扑;在不完整地图中,实时感知与快速重规划确保了安全导航;对于动态障碍物,系统能生成与移动物体时空域不重叠的安全轨迹。在这种极端条件下,系统仍保持了极高的导航成功率,真正意义上做到了"看得见,绕得过,避得开"。
畅想未来
当前系统仍面临从仿真到现实的部署挑战:真实世界环境复杂多变,传感器噪声和环境遮挡等因素可能影响规划精度,部分极端场景更可能超出仿真训练范畴。为此,我们计划打造更高精度的场景仿真系统,逐步弥合虚拟仿真与现实场景的鸿沟。随着人工智能算法迭代与硬件性能升级,我们期待通过这些技术改进突破现有瓶颈,最终实现真正意义上的人类级导航智能,让机器人在全场景环境中实现安全、可靠、可预测的自主作业。