全球机器人领域的顶级学术会议 ——“2025 年 IEEE/RSJ 智能机器人与系统国际会议(IROS 2025)” 将于2025年10月在杭州召开,本次会议中,微分智飞技术委员会成员浙江大学高飞教授、南方科技大学周博宇教授、中山大学吕熙敏教授各团队共计发表15篇论文。成果涵盖了空中机器人、运动规划、自主导航、环境感知、强化学习等多个 IROS 2025 重点关注的研究方向。
IEEE/RSJ国际智能机器人与系统会议(IROS)自1988年首次举办以来,凭借其卓越的学术影响力和广泛的行业参与度,成为了推动机器人技术创新与产业发展的关键力量。作为机器人领域最具权威性和影响力的国际盛会之一,IROS覆盖从基础理论研究、核心技术开发到实际应用落地的全链条议题,是学界与工业界交流最新成果、探索未来趋势的核心平台,一直吸引着从事机器人研究的学界和产业界人士竞相参与。多年来,IROS汇聚了全球顶尖的科研成果和创新理念,推动着机器人技术不断向前发展。

01#
SEB-Naver: A SE (2)-based Local Navigation Framework for Car-like Robots on Uneven Terrain
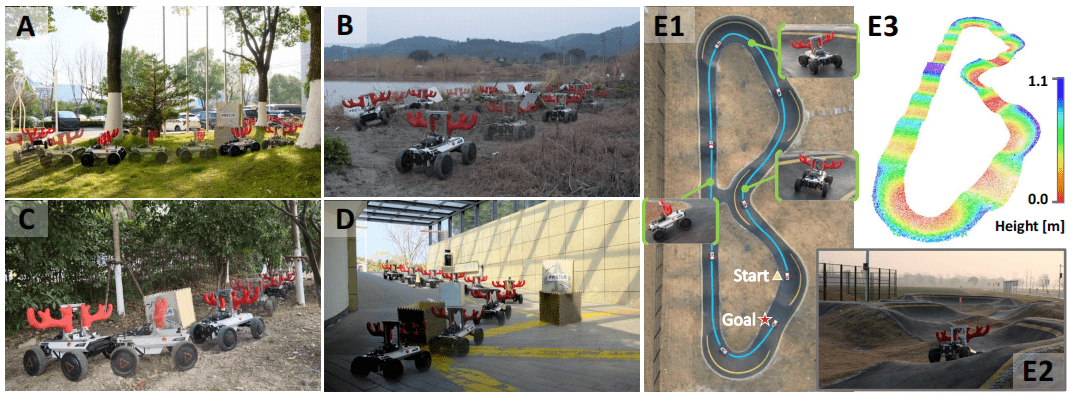
基于SE(2)的类车机器人在不平坦地形上的局部导航框架。用GPU实时构建SE(2)空间中的可通行性地图,并使用微分平坦推理机器人运动学变量加速轨迹优化。
02#
Shape-Adaptive Planning and Control for a Deformable Quadrotor
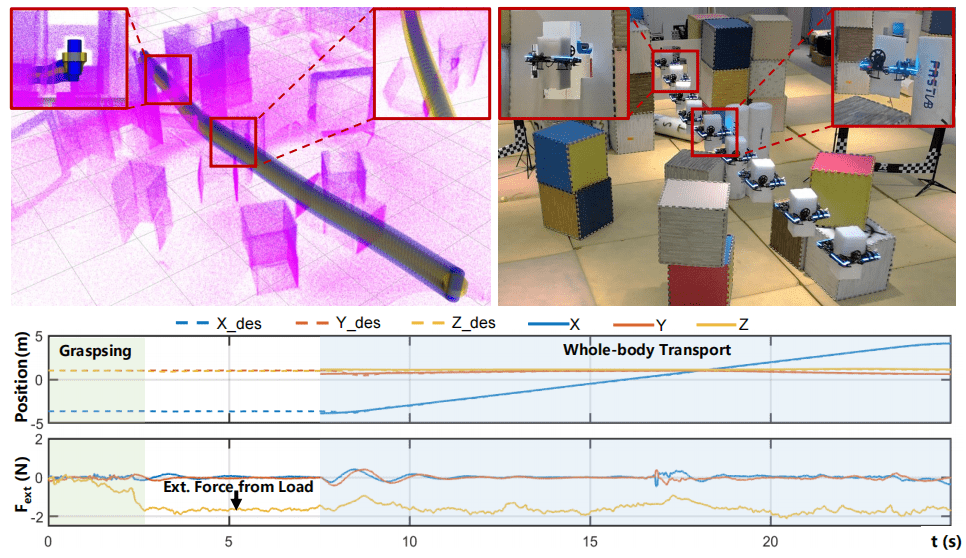
提出可变形四旋翼的形状自适应的规划与控制方法,实现自主狭窄穿越与多模态飞行运输搬运任务。
03#
Automatic Generation of Aerobatic Flight in Complex Environments via Diffusion Models
该工作利用扩散模型从局部轨迹演示中学习特技动作表征,实现了长时序特技飞行的自动生成。相较于依赖人工参数调整与轨迹设计的传统方法,本方法在保证动作多样性的同时显著降低了人工设计需求。
04#
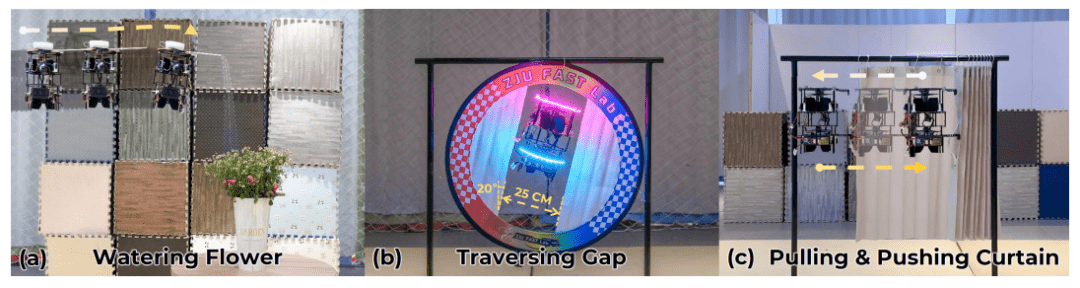
FLOAT Drone: A Fully-actuated Coaxial Aerial Robot for Close-Proximity Operations
本工作提出了一种专为可靠空中近端作业设计的新型全驱动共轴无人机FLOAT Drone。其具有动力学解耦、侧向气流扰动小、尺寸小巧等优点,能够完成推拉柔性窗帘、穿越倾斜窄缝以及浇花等实用任务,为复杂空中操作任务提供了一个创新平台。
05#
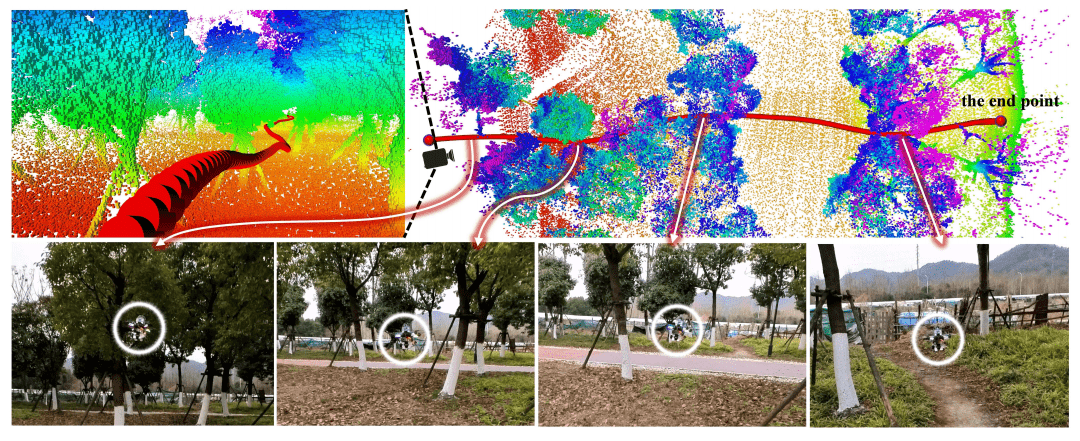
Flying on Point Clouds with Reinforcement Learning
提出强化学习驱动的四旋翼无人机避障飞行方法,使用雷达点云作为网络输入,输出飞行控制指令推力和角速度。
06#
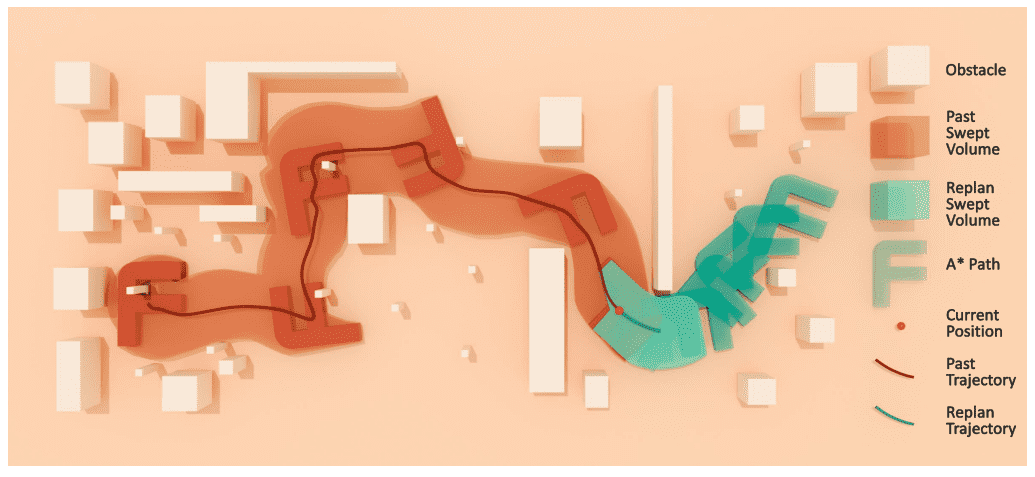
Any-shape Real-time Replanning via Swept Volume SDF
本文提出了一种基于扫掠体积符号距离场(SVSDF)的任意形状机器人路径规划方法,通过实现一种更高效的SVSDF算法,并采用B-样条参数化轨迹,在i50000 NUC11TNK上实现了真实复杂环境中的任意形状机器人实时10Hz重规划。
07#
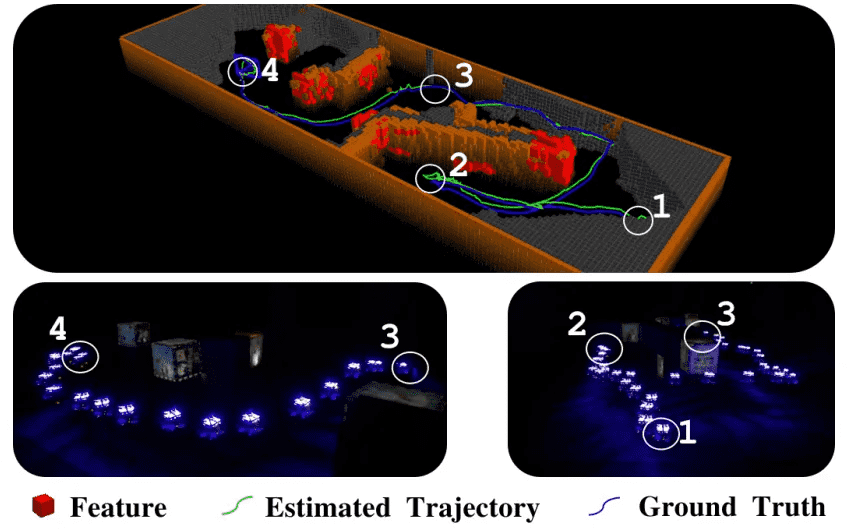
Perception-aware Planning for Quadrotor Flight in Unknown and Feature-limited Environments
提出一种感知意识的规划方法,通过分配感知资源、引入视点转换图自适应选择目标视点,结合兼顾探索与定位能力的偏航轨迹生成法构建可定位走廊,在未知且特征有限环境中实现无人机高效可靠导航。
08#
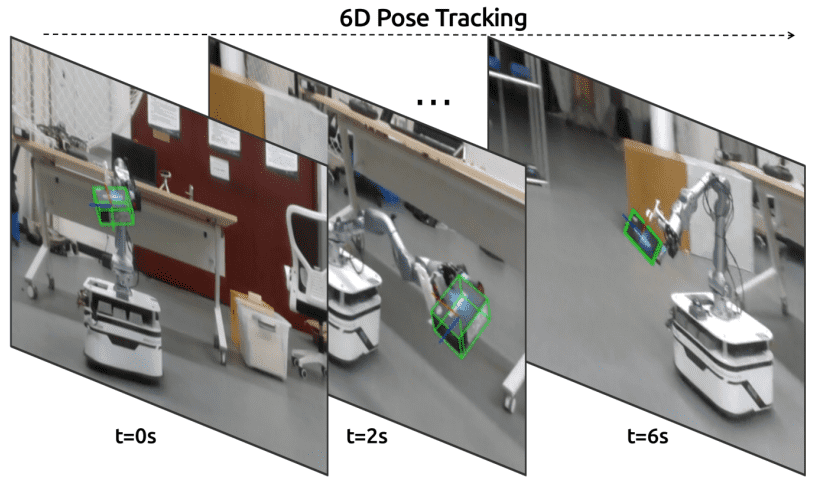
DynamicPose: Real-time and Robust 6D Object Pose Tracking for Fast-Moving Cameras and Objects
提出了免重训练的 6D 姿态跟踪框架,通过视觉惯性里程计补偿相机运动导致的感兴趣区域偏移、深度信息 2D 跟踪器纠正物体大位移引起的区域偏差,以及 VIO 引导的卡尔曼滤波器预测物体旋转并经分层优化得到最终姿态,形成闭环系统,在高动态场景中实现对快速移动物体和相机的实时鲁棒 6D 姿态跟踪。
09#
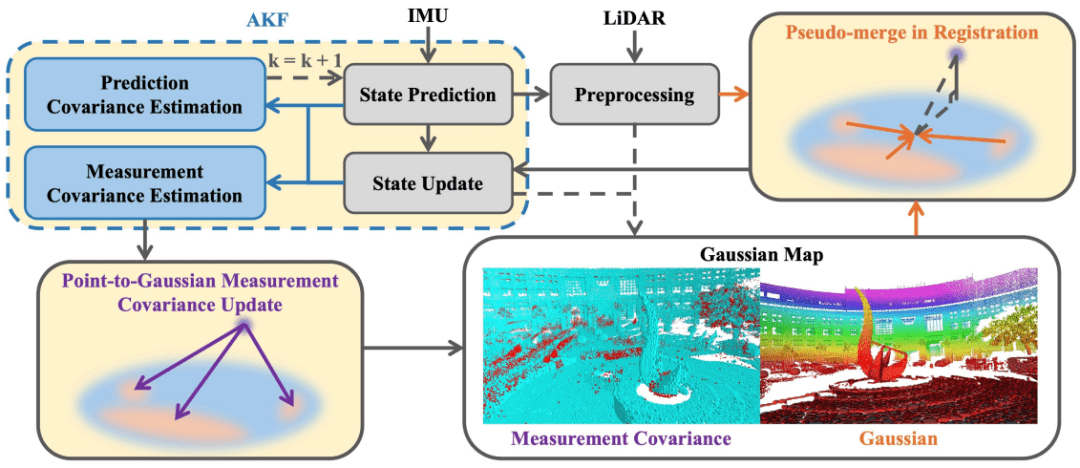
AKF-LIO: LiDAR-Inertial Odometry with Gaussian Map by Adaptive Kalman Filter
提出一种自适应卡尔曼滤波(AKF)框架用于激光雷达 - 惯性里程计(LIO),动态估计激光雷达与 IMU 测量的时变噪声协方差以实现传感器间的上下文感知置信度加权,在激光雷达退化时优先使用 IMU 数据并抑制移动物体等不可靠输入,同时引入基于高斯的紧凑地图表示建模环境平面性与空间噪声,通过相关配准策略经伪合并确保平面法向量准确估计,实验验证了其在动态场景和几何退化等多样环境中的鲁棒性。
10#
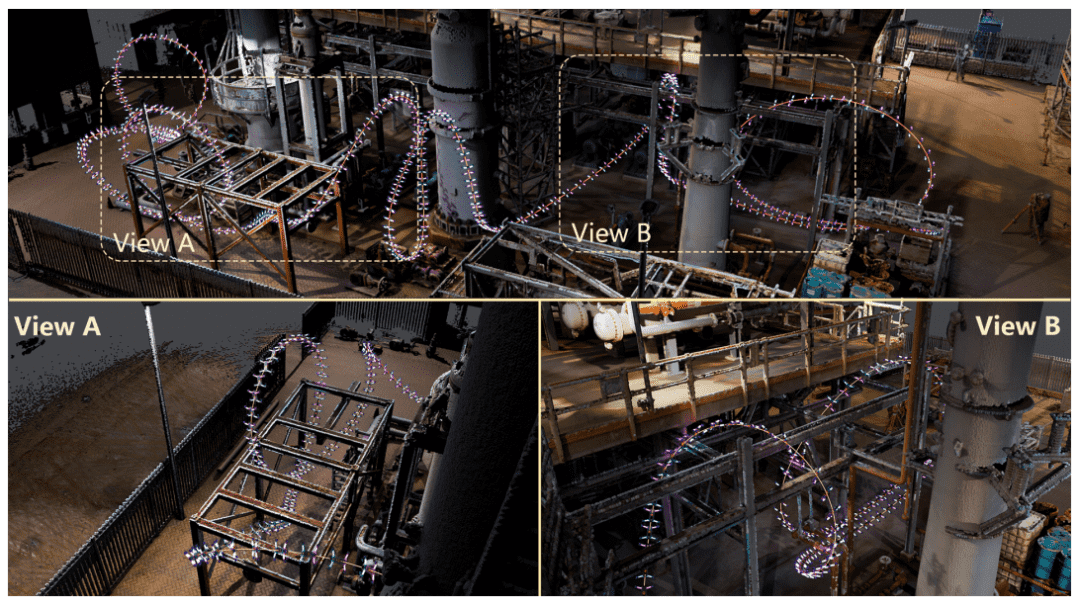
EPIC: A Lightweight LiDAR-Based UAV Exploration Framework for Large-Scale Scenarios
提出轻量级激光雷达 UAV 自主探索框架,通过直接利用点云数据构建基于点云质量的观测地图,省去全局占据网格地图,并引入直接在点云上操作的增量拓扑图构建法实现实时路径规划,形成分层规划框架以生成敏捷节能轨迹,大幅降低内存消耗与计算时间。

11#
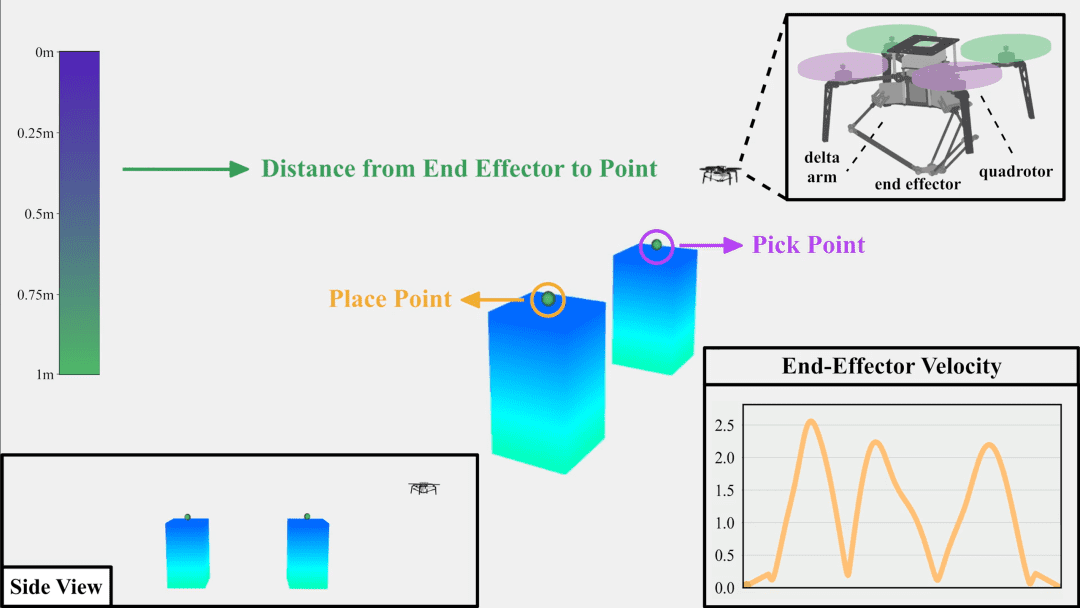
Aerial Grasping via Maximizing Delta-Arm Workspace Utilization
提出了一种面向空中机械臂抓取任务的新型规划框架,通过结合多层感知机和可逆残差网络来最大化工作空间利用率,实现了对复杂非凸约束的有效处理和轨迹优化,为提升空中操作系统的灵活性和作业效率提供了重要的技术支撑。
12#
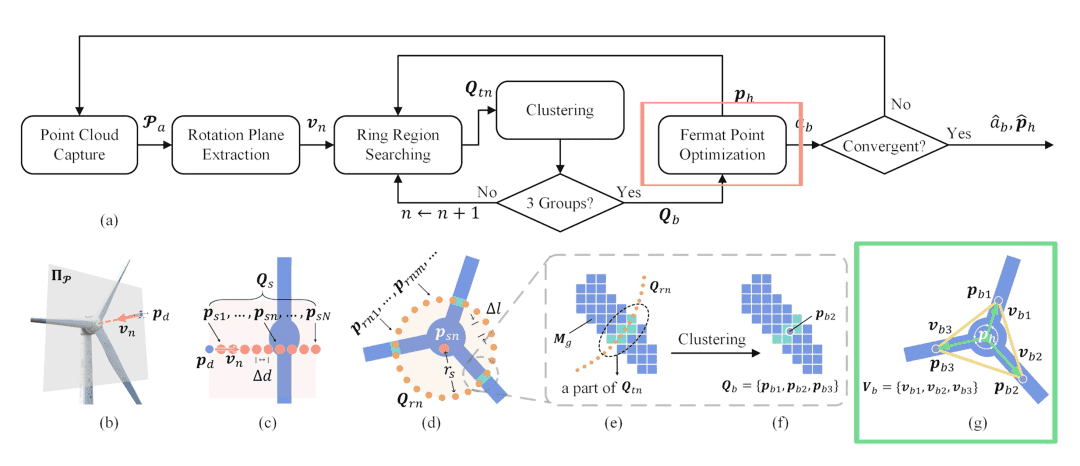
Automated UAV-based Wind Turbine Blade Inspection: Blade Stop Angle Estimation and Blade Detail Prioritized Exposure Adjustment
面向更加自主的风机叶片巡检,基于无人机平台提出了两种方法:1、一种基于费马点的叶片停止角估计方法,提供先验叶片位置参考;2、一种基于投影的叶片细节优先曝光调整方法,实时优化叶片表面亮度并保留细节。这为推动工业巡检的自动化和智能化提供了新的解决方案,为加速无人机技术的产业落地提供了重要的应用参考。
13#
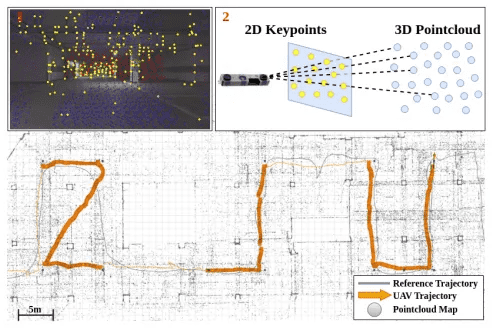
Building Hybrid Omnidirectional Visual-Lidar Map for Visual-Only Localization
提出一种面向资源受限无人机的视觉-LiDAR混合建图与基于该地图的纯视觉重定位系统,通过构建全向关键帧关联图像与点云,实现高效精确的位姿估计,具备任意朝向重定位能力。
14#
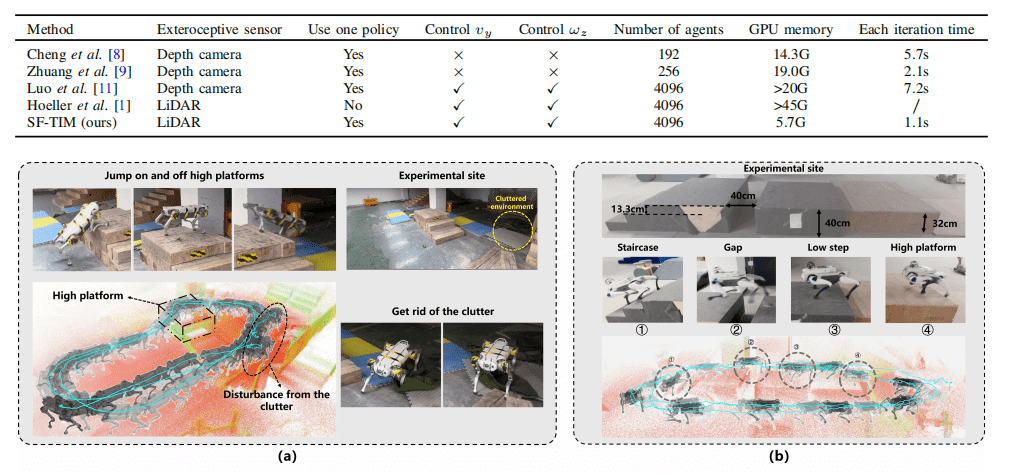
SF-TIM: A Simple Framework for Enhancing Quadrupedal Robot Jumping Agility by Combining Terrain Imagination and Measurement
本论文结合地形想象与测量以提升四足机器人跳跃敏捷性,并通过地形引导奖励设计与高效稳定的高程图生成,实现盲走与动态跳跃能力的统一及零样本从仿真到现实的迁移,在高平台和裂缝上展示了鲁棒稳定的动态跳跃能力。
15#
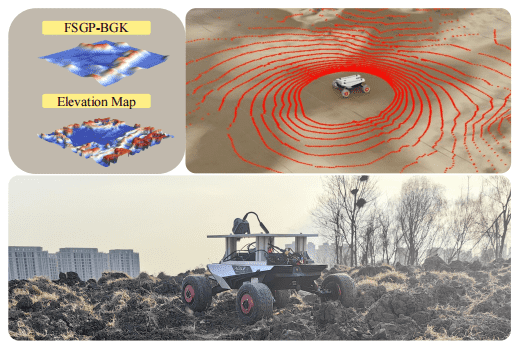
Real-time Spatial-temporal Traversability Assessment via Feature-based Sparse Gaussian Process
本论文提出一种融合稀疏高斯过程与时空贝叶斯高斯核推理的地形可通行性评估方法,结合GPU加速的点云特征提取与高分辨率通行性建图,实现了面向复杂户外环境的实时导航系统,并在真实差速机器人平台上验证其优越性与实用性。